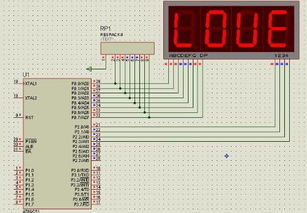
在使用 Proteus ISIS 7 Professional 進行電路仿真時,動態數碼管不顯示是一個常見問題。這通常并非軟件本身故障,而是由電路設計、元件配置或程序代碼中的細節錯誤導致的。以下將系統地分析可能導致此問題的原因,并提供相應的排查與解決步驟。
一、 核心原因分析
- 共陰/共陽類型與電路不匹配:
- 問題:動態數碼管有共陰極和共陽極兩種。如果程序代碼是為共陽極數碼管編寫的(位選信號有效時給高電平,段選信號給低電平點亮),但電路中實際放置或配置的是共陰極數碼管,或者反之,則數碼管完全無法點亮。
- 解決:在 ISIS 中雙擊數碼管元件,確認其“Common Cathode”(共陰)或“Common Anode”(共陽)屬性是否與程序邏輯匹配。務必保持硬件配置與軟件代碼一致。
- 限流電阻缺失或不當:
- 問題:無論是段選線還是位選線,直接連接到單片機I/O口而沒有串聯限流電阻,可能導致電流過大,在仿真中表現為信號異常或無法驅動。雖然仿真中元件不會“燒毀”,但正確的電路習慣必須養成。
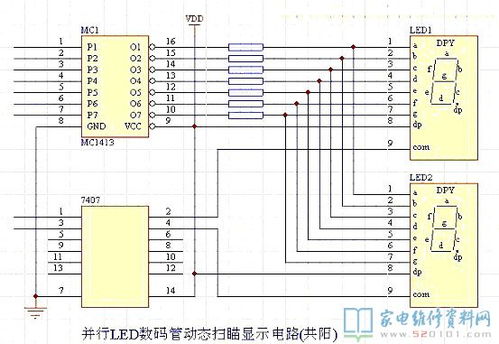
- 解決:在每條段選線上(a, b, c, d, e, f, g, dp)串聯一個220Ω至1kΩ的電阻。位選線(COM端)如果由單片機I/O口直接驅動,也應考慮增加電阻,或使用三極管、驅動芯片來增強驅動能力。
- 驅動電流不足(位選驅動問題):
- 問題:動態掃描時,位選信號需要同時驅動多個LED段(一個數字),所需的電流較大。單片機I/O口的拉電流和灌電流能力有限,可能不足以使數碼管達到正常亮度,在仿真中表現為極暗或不亮。
- 解決:位選線(COM端)不要直接連接單片機I/O口。建議使用PNP三極管(共陽)或NPN三極管(共陰)進行驅動,或者使用專用的數碼管驅動芯片(如74HC573、ULN2003等)。在ISIS中,可以添加這些元件并正確連接。
- 程序代碼(微控制器)問題:
- 掃描頻率不當:刷新率太低(如小于50Hz)會導致肉眼可見的閃爍;刷新率太高(如超過幾千Hz),則每個數碼管點亮的時間過短,平均亮度會非常低,看起來就像不亮。通常掃描周期在1-20ms之間為宜。
- I/O口配置錯誤:確保程序中設置了正確的I/O口方向(如設置為輸出模式)。
- 邏輯錯誤:動態掃描的核心是“分時點亮”。程序必須確保在任一時刻,只有一個位選信號有效(對于共陽是高位,共陰是低位),同時段選數據對應要顯示的那個數字。如果同時使能了多個位選,會導致顯示混亂或重疊,亮度不均。
- 消隱處理缺失:在切換位選信號前,應先將所有段選關閉(共陽送高電平,共陰送低電平),切換到位后再送入新的段選數據。否則會在切換瞬間產生“鬼影”(上一個數字的殘影)。嚴重的鬼影可能干擾正常顯示。
- 電源與接地問題:
- 問題:忘記給數碼管連接電源(共陽極接VCC)或地(共陰極接GND)。或者電路中存在未連接的懸空引腳。
- 解決:仔細檢查原理圖,確保共陽/共陰公共端正確連接到了電源或地。使用ISIS的“電氣規則檢查”功能可以幫助發現未連接的引腳。
- 元件模型或仿真設置問題:
- 問題:極少數情況下,可能使用了有缺陷的元件模型,或者仿真設置(如單片機頻率)與程序不匹配。
- 解決:嘗試從 Proteus 官方庫中重新放置一個數碼管元件(如7SEG-MPXx-CA或7SEG-MPXx-CC)。檢查單片機屬性中的時鐘頻率是否與程序預設的晶振頻率一致。
二、 系統化排查流程
- 靜態測試:首先進行靜態測試以排除數碼管本身和基本連接問題。
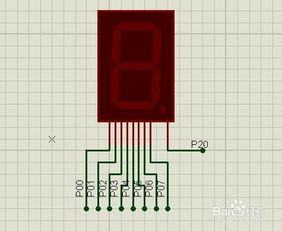
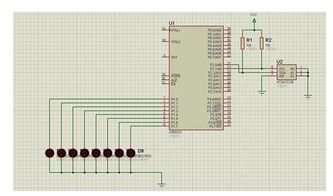
- 暫時將動態數碼管改為單個靜態連接。例如,對于共陽數碼管,將其公共端COM直接接VCC,將段選線a, b, c, d, e, f, g通過限流電阻分別接單片機的一個I/O口(或直接接地)。運行一個簡單程序,依次控制每個I/O口輸出低電平,觀察對應的段是否能單獨點亮。如果靜態下能正常點亮,說明數碼管和基本段電路是好的。
- 檢查硬件電路:
- 確認數碼管類型(CC/CA)。
- 確認所有段選線上都有限流電阻。
- 確認位選端使用了合適的驅動電路(三極管等)。
- 確認電源和地連接正確。
- 檢查軟件程序:
- 確認I/O口初始化正確。
- 重點檢查動態掃描函數:
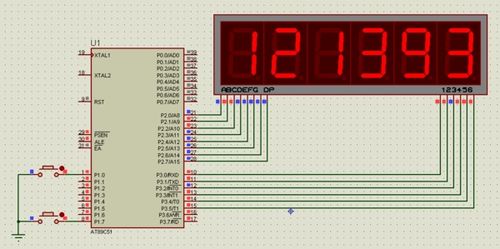
- 時序:在仿真中,可以利用ISIS的虛擬示波器或邏輯分析儀觀察位選和段選信號的時序波形,確保掃描間隔合理,且沒有多個位選同時有效的情況。
- 消隱:在代碼中加入消隱步驟。
- 段碼表:核對共陰/共陽的段碼數據表是否正確。
- 聯調:
- 在程序開始時,先嘗試固定顯示一個數字(例如,只讓第一個數碼管顯示“8”)。簡化問題,逐步調試。
- 使用Proteus的仿真暫停、單步執行功能,結合觀察電路中的電壓探針/邏輯狀態,查看在代碼執行每一步時,關鍵引腳的電平是否按預期變化。
通過以上由簡到繁、軟硬結合的排查方法,絕大多數 ISIS 7 Professional 中動態數碼管不顯示的問題都能得到有效定位和解決。關鍵在于理解動態掃描的原理,并確保硬件配置與軟件邏輯的精確匹配。